




自动化立体仓库中的物流分拣
自动化立体仓库中的物流分拣过程大致归纳为:叉车先将货物放在输送线上,货物被输送到指定的货架前,然后堆垛机通过X、Y、Z三个方向的协同运动,将货物存入指定的货架中,实现仓库空间的高效利用。
现场控制系统使用西门子控制器,通过交换机走Profinet通讯协议与零点BN-8032-L一体式IO通讯连接,挂载两个数字量输入模块,采集堆垛机X、Y、Z三个轴上的限位传感器信号。
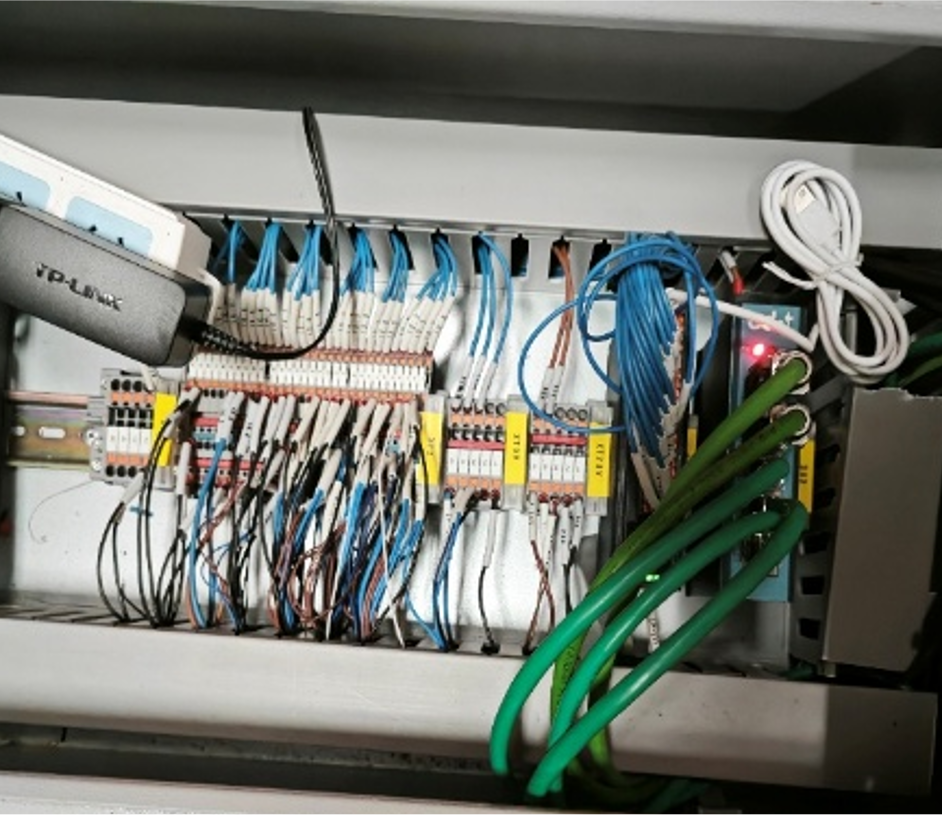
BN-8032-L Profinet 通讯板支持标准 Profinet IO Device 设备通讯,通讯板支持最大输入 1440 字节,最大输出 1440 字节, 支持的扩展 IO 模块数量为 4 个。
BT-124F是数字量输入模块。负责采集限位传感器的状态信号等。

